
RGB Pixel LEDs come in a huge range of packages and can be used in many areas in an animatronic prop ranging from eyes balls to general lighting.![]()
This project lets you control a string (pretty much any number) of WS281x style pixels (any pixel supported by the FastLED library). It doesn`t support any sort of animation (all pixels will have the same color) but you can adjust brightness and color of the string as a whole. One servo channel controls the overall pixel brightness and another controls the overall pixel color. The circuit uses a Arduino NANO and is powered by +5V from the servo controller (which should be fine unless you are driving a huge amount of pixels).
![]() The circuit is extremely simple and just needs the NANO (should work on any Arduino variant). The code uses the pulseIn() function to determine the pulsewidth of the control signal and then adjusts the FastLED parameters accordingly. There are better ways to measure the pulse width (pulseIn() is a blocking function) but they need to use interrupts and FastLED doesn’t like such things. I do notice a bit of strobing at very low light levels but that wasn`t an issue for my project.
The circuit is extremely simple and just needs the NANO (should work on any Arduino variant). The code uses the pulseIn() function to determine the pulsewidth of the control signal and then adjusts the FastLED parameters accordingly. There are better ways to measure the pulse width (pulseIn() is a blocking function) but they need to use interrupts and FastLED doesn’t like such things. I do notice a bit of strobing at very low light levels but that wasn`t an issue for my project.
In the code you can adjust various configurations:
NUM_LED – The number of pixels you have connected
LED_PIN – The pin you have the Pixels connected to
LED_TYPE – Type of pixels (see FastLED docs for options)
COLOR_ORDER – Oder of pixel colors (see FastLED docs for options)
BRIGHTNESS_PIN – Servo input for brightness control
COLOR_PIN – Servo input for color control
MIN_PULSE – This is the minimum pulse width the code will respond to. Set this to the same as your servo controller is set for.
MAX_PULSE – This is the maximum pulse width the code will respond to. Set this to the same as your servo controller is set for.
If you don`t adjust the MIN/MAX values to your expected control signal you may find the bottom and top ends of the control have no effect.
Here is the Arduino code for the project:
Here is a PDF of the wiring diagram for the project:
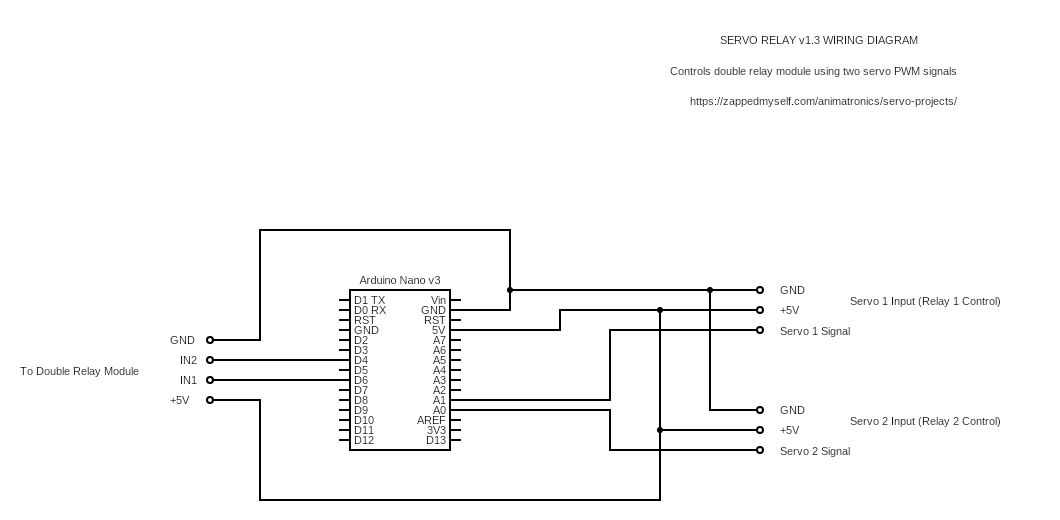 The circuit is extremely simple and just needs the NANO (should work on any Arduino variant) and the relay module. The code uses the pulseIn() function to determine the pulsewidth of the control signal and then turns the relays on or off as required. It uses +5V power from the servo controller to power the relays.
The circuit is extremely simple and just needs the NANO (should work on any Arduino variant) and the relay module. The code uses the pulseIn() function to determine the pulsewidth of the control signal and then turns the relays on or off as required. It uses +5V power from the servo controller to power the relays.
In the code you can adjust various configurations:
PWM_IN_1 – Servo input for Relay 1 control
PWM_IN_2 – Servo input for Relay 2 control
PWM_LOW_SETPOINT – Pulse width value under which the relay is turned off
PWM_HIGH_SETPOINT – Pulse width value over which the relay is turned on
PWM_DISCONNECTED = Pulse width value over which the relay is turned off. This ensures the relay stays off if the PWM servo signal is removed.
Here is the Arduino code for this project:
Here is a PDF of the wiring diagram for the project: